- ホーム
- >会社案内
上のメニューボタンにマウスを乗せると、サブメニューが表示されます。
|
会社案内 >会社案内 |

|
◆ごあいさつ
◆特 徴
◆三秀電子は仕様書に基づき、一品一様の製品開発を行ってまいりました。
近年、画像解析ソフトウエアの開発を多く手掛けています。析出物検出画像処理、RG温度変換疑似カラー表示ソフト、
画像センサ音響模擬、石炭ガス化炉スラグ流動特殊監視装置など、又、雲台に搭載したカメラを位置制御することで
遠隔監視カメラ追跡画像処理ソフトを実用化、約10年開発に携わりました。
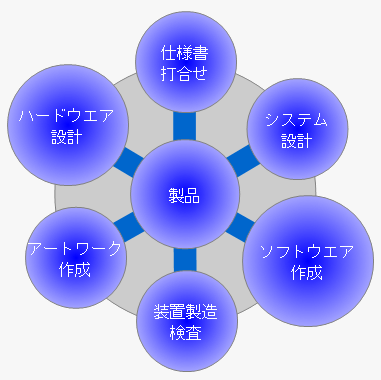
組込コンピュータ関連では、LAN工業用サーバー構築、リモートIO制御装置設計・製作(LAN・USB・RS-485・MODBUS通信) パルスモータ制御装置設計・製作を手掛けました。 アナログ電子回路、及び、下記の4分野の設計製作を一貫して行い、 総合的な見地からそれぞれに最適な分担を割り振ることが可能です。 処理能力に適切なCPU、アナログ電子回路、ソフトウエア言語などの選定、及び、プログラムの構成と流れに注意を払います。 電子回路の設計思想をソフトウエア作成に生かします。
◆三秀電子では、使い勝手の良い製品作り、処理速度の高速化に力を注いでいます。
ストレスを感じさせない操作性を確保するため、
理論計算による処理時間の確認を行います。
CPUボードでは、実際の動きをオシロスコープにて確認しその処理時間が妥当であるか否かの確認を行います。
処理速度の高速化を行うため
画像変換プログラムに於いて
"2時間かかっていた現状のシステムより100倍速くなった。"
と感嘆のお言葉を頂きました。
◆三秀電子は、何が起きているのかを把握し、より早く解決する手法を構築しています。
ソフトウエアのライブラリーに関しては、可能な限り弊社にて一から作成しています。
デバック時、トラブルが発生した場合、確実に解決するためです。ソフトウエアを一から作成し、その作成方法を
工夫することで、今、何が起きているのかを把握し、より早く解決する手法を構築しています。
◆三秀電子は、ノイズに強い、耐環境性の製品作りを目指します。
ノイズに強いシステムを製作するため、弊社では部品の配置に最も注意を払います。
例えばCPUボードを作成する場合 高周波ノイズを発生する部分、外来のノイズが進入しやすいIO、
通信部分は、配置を分離しシールドし絶縁します。
高周波ノイズを発生する信号は、 高周波ノイズ専用のGNDを通して電源へ戻します。
製品開発の職務概要をご参照下さい。 |

◆製品開発の職務概要
◆VIFチューナー調整器の検査
若い頃、テレビのVIFチューナー調整器の検査からスタートしました。高周波発振器のsweep波形を
アンプに加えスペクトルアナライザでアンプの帯域の検査、局部発振回路とクリスタルフィルタを使用した
出力レベルの確認などを通してトランスの影像インピーダンス、伝送路のインピーダンス、
SWR、スタガ同調フィルタなど多くのことを学びました。この事がCPUボードを設計する上で基礎知識となっています。
◆PID油圧位置制御
その後、自動制御に携わり油圧サーボバルブのアンプ、LVDTアンプや、PWMモータドライバ、
オペアンプと乗算型D/Aを使用したアナログPID制御装置の開発などのサブ担当を経験しました。
又、自らデジタルサーボCPUボードの回路設計を行いました。油圧システムで、フィードフォワードPID位置制御を行い、
分解能2.5μmのリニアスケールを使用して10μmの精度を達成できました。
◆コイン貸出機
その後コイン貸出機の開発に携わり、ノイズシュミュレータを使用して差動モードAC1800V、湿度の高い雨の日にコモンモード
AC1500Vを達成しました。
複数の協力を頂きながら、基板検査機を作成、全国3万台納品しました。トラブルは0.1%程度でした。殆ど水晶振動子の交換で解決しました。
お客様から”安心して納品できた。”との評価を頂きました。ノイズに強い制御装置
◆ホストコンピューター集計装置
◆バーインボード
特殊なIC の温度サイクル試験を行うバーインボードの各種回路設計を行いました。当時マイナスから+85度に耐えうるIC、機構部品
の選択に苦労したことを覚えています。
◆ハンドル駆動油圧トルクテスタ
◆石炭ガス化炉スラグ流動画像監視ソフト
◆リチウム二次電池充電バイパス回路
リチウム二次電池充電バイパス回路試作基板を設計製作しました。リチウム二次電池の充電が完了すると切り離し、残りの電池の充電を
継続するものです。
一個のCPUで4直列の電位の異なるリチウム二次電池電圧を単一のオペアンプとマルチプレクサでモニターし均一充電をを行う制御ボードを設計試作しました。
複数のシステムで、安価なマイクロコンピュータPICを使用しました。PIC16F688、PIC16F877A、PIC17F756A、
PIC16F886、PIC18F4221等、回路設計、ソフトウエア作成を行っています。
◆変動濃度計測システム
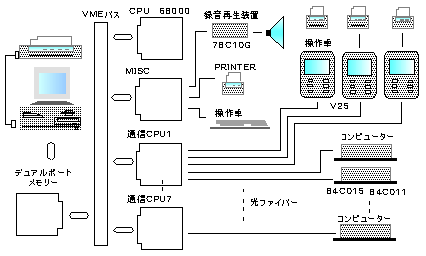
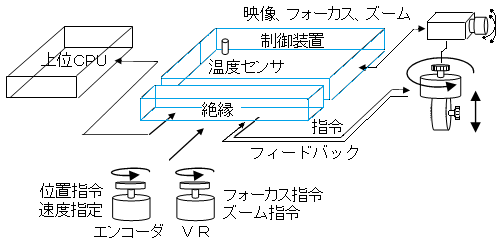
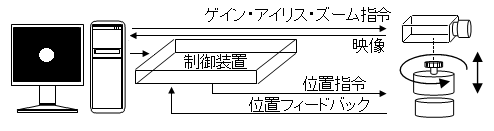
◆小型監視カメラ制御装置
◆監視カメラ画像処理ソフト
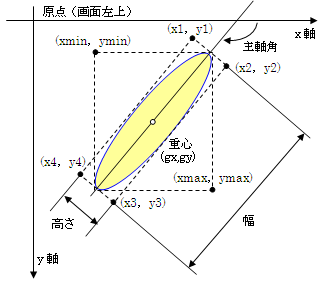
約10年間、監視カメラ画像処理ソフトの開発に携わりました。リアルタイムで被写体の検出に成功、
リアルタイムで背景のあるカラー画像の中から対象物を追跡するソフトを作成しました。画像処理ライブラリの
各関数の処理時間を計測し、最適な処理を見つけ、リアルタイムで30mS以内に処理を完了することに苦労しました。
◆CAD関連ソフト・音響関連ソフト
CAD関連ソフトで外積、内積、鉛直距離、直線分と円弧との距離算出、図形の回転、図形の組み合わせ、図形描画等の処理を
行いました。
又、音響関連ソフトで、図形オブジェクトの表示、座標変換、回転行列、ドップラーシフト演算、行列演算、連立方程式、
複素数演算、複素FFT、複素IFFT演算等の処理を行いました。
FFT変換例
◆パルスモータ制御・リモートIO制御
ARMの組み込みCPUとパルスモータドライバを備えた制御装置の回路設計・試作を行いました。
SH2Aの組み込みCPUとLAN、RS-485、MMCカード、温度計測、アナログ入出力を備えたリモートIO 制御装置の回路設計・試作を行いました。 MODBUS、LAN、USB、MMCカードなどのドライバーソフトを作成しました。
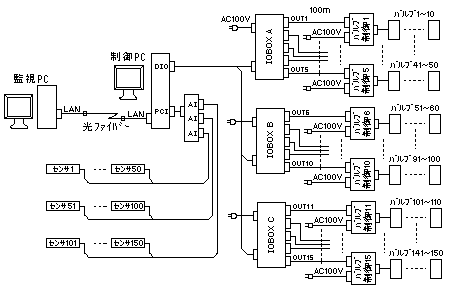
◆LAN工業用サーバーの構築
LAN工業用サーバーの構築(OS:μITRON)を行いました。複数のPCからLAN経由でコマンドを受付、
複数のボードに対しRS-422経由でステップ毎のリレーのON/OFFを指令、又、複数のボードの計測結果を上位のPCへ
LAN経由で応答するソフトウエアを作成しました。LAN/RS-232Cコンバータを作成しました。
リアルタイムOS(μITRON)を使用して、タスク毎に優先順位を設定、割り込み受信でデータをバッファに保存後、
優先順位の高いタスクを起動することで、短い応答時間を実現しました。
◆粒子抽出画像処理ソフト
◆CUDAとDirectXと相互運用
GPU上で統合開発環境CUDAを使用してDirectXと相互運用
を行い、画像をロード後GPU上で変更、DirectXにて表示するプログラムを作成しました。
又、サンプルプログラムを使用してGPUの画像加算処理時間を計測しました。データ数1280*960=1228800、grid=2400
,block=512、GPU450の条件下で、CPUからGPUへの転送時間1.5mS、GPU上で加算処理時間0.64mS、
GPUからCPUへ転送時間0.6mSと転送に時間が掛かりました
(Windows7、Corei7-870 2.93GHz 32bit)。
CPUとGPUを使用した場合、余分に転送時間が追加されます。
マルチCPU構成での並列演算と、SIMD命令 (SSE)による並列演算命令を組み合わせた加算処理時間が80μS程度で、上記の粒子抽出画像処理システムでは、CPUのみで仕様を満足する結果となりました。
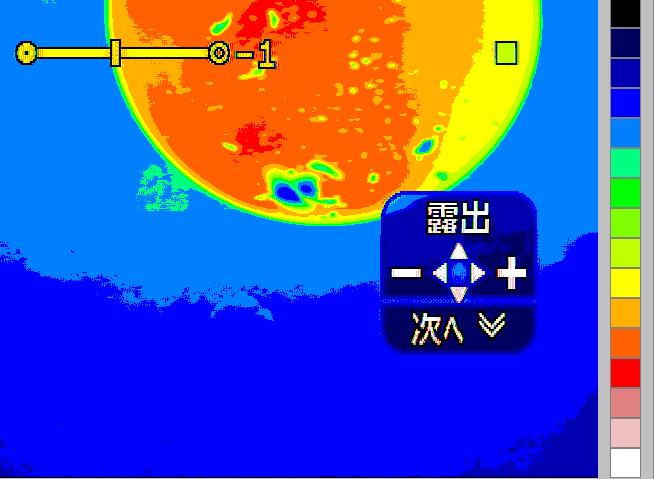
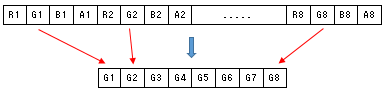
◆RGB変換ソフト
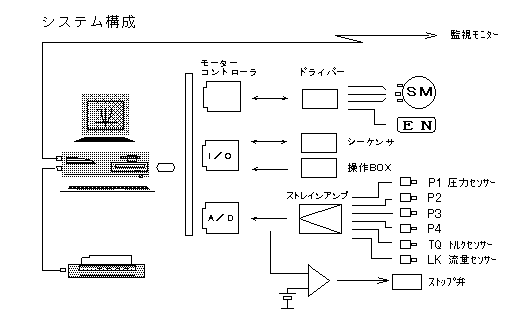
◆模型船向け制御試験装置
リモート接続で制御パラメータを転送、制御時の各種センサーのモニタリング及びロギングを行う、
4軸模型船向け制御試験装置を作成しました。組み込みボードを設計、製作しました。
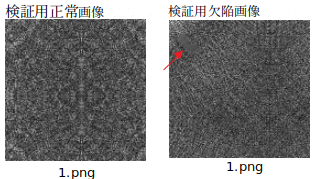
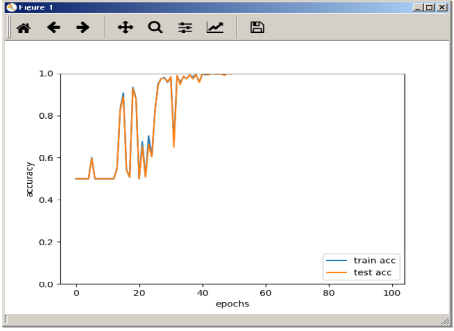
◆AIによる表面のキズ、欠陥検知
◆RaspBerry PIで動作するIOコントローラ
RaspBerry PIは価格が数千円で購入でき、CPUは
PI4B:ARM Cortex A72 1.5GHz4コア、
高速でWIFI、EtherNet、Buletooth、USB、GPIO、HDMIを搭載した
IOT向けのコンピュータボードです。キーボード、モニターを接続すればOS Linuxを搭載した簡易なパソコンです。
model:3B、Python3を使用してIOコントローラをプログラミング、実用可能なシステムを構築しました。 spidev、AD,DA,WiringPiなどのライブラリを使用し、開発環境はVsCode上でSSHによるリモート接続です。 プログラムの高速化を可能とするためCUIとし、RaspBerry pi上でプログラムを実行、開発環境はWindows上に インストールしました。 GPIOからPython3を使用して300KHz、Cライブラリを使用した場合、14MHzの矩形波を出力できました。 A/D変換も0.1%の変換精度です。
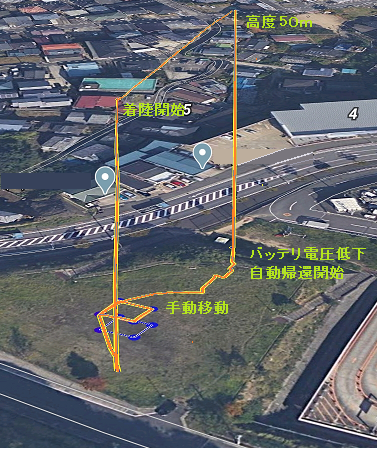
◆ドローンプログラミング
|
>過去の主な業務履歴
◆会社概要
| 社名 | 三秀電子有限会社 |
|---|---|
| 所在地 |
〒852-8024 長崎市立岩町20番27号 TEL 095-862-5306 |
| 創立 |
2001年2月に個人事業主として三秀電子を設立 2005年2月に三秀電子有限会社として法人化 |
| 資本金 | 3,000,000 |
| 取締役 |
|
| 事業内容 | 回路設計、ソフト作成、装置製造、パターン作成 |
|
電子機器のハード回路設計、 パターン設計、装置製作から、 ソフト作成、品質検査、ドキュメント作成まで 一貫して弊社にて行う事が可能です。 |
|
>過去の主な業務履歴
約15年間の主な業務履歴の一覧の敬称を掲載しました。
>画像処理システム
画像処理システムの構成に関して記載しています。詳細はタイトル[実験]の項目を参照して下さい。
>PCシステム
PCを使用したシステムの概要について記載しています。
>組込コンピュータボード製作
組込マイクロコンピュータボード設計の概要について記載しています。
>組込コンピュータソフト作成
組込マイクロコンピュータソフト作成の概要について記載しています。
>画像処理基本ソフト
>小型監視カメラ制御装置
>変動濃度計測システム装置
>油圧トルクテスタ
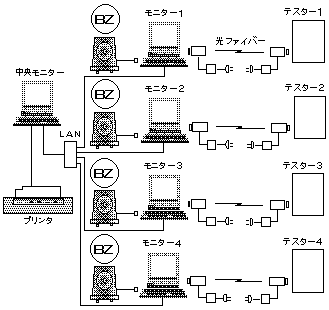
>PC監視モニター
>ノイズに強い制御装置
>アナログ回路
約15年間の主な業務履歴の一覧の敬称を掲載しました。
>画像処理システム
画像処理システムの構成に関して記載しています。詳細はタイトル[実験]の項目を参照して下さい。
>PCシステム
PCを使用したシステムの概要について記載しています。
>組込コンピュータボード製作
組込マイクロコンピュータボード設計の概要について記載しています。
>組込コンピュータソフト作成
組込マイクロコンピュータソフト作成の概要について記載しています。
>画像処理基本ソフト
>小型監視カメラ制御装置
>変動濃度計測システム装置
>油圧トルクテスタ
>PC監視モニター
>ノイズに強い制御装置
>アナログ回路