- ホーム
- >実 験
- >画像処理 追跡処理
|
実験 >画像処理基本ソフト >画像処理・処理速度の比較 関連項目 >PIDむだ時間補償シミュレーション >組込コンピュータソフト作成 >組込コンピュータボード製作 >ノイズに強い制御装置 |
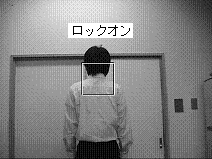
画像処理にてターゲットを ロックオン
PID位置制御にて追跡 繰り返し精度:高精度 |
パターン認識 : テンプレートマッチング
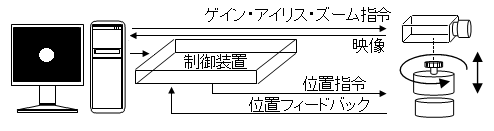
映像をマウスでクリックした座標を中心座標として、ある大きさで周辺の矩形領域をテンプレートとして登録します。 映像を左上から右下にサーチしながら入力映像の中に登録したテンプレート画像と一致する画像を見つけ、その座標を 決定します。背景のある映像の中からテンプレート画像をサーチして位置座標を検出し、PID位置制御を行うことで テンプレート画像の追跡を行います。
(PID位置制御=指令位置に対し制御対象位置のフィードバックを行い指令位置と制御対象位置の偏差を求め 偏差が小さくなるように比例、積分、微分のゲイン補償を行う。)
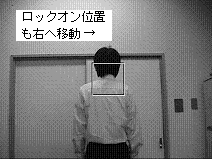
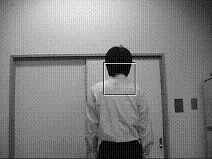
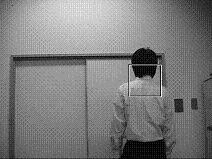
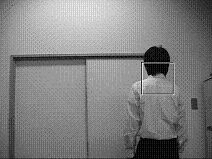
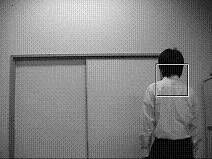
下図は、固定カメラにて撮影した人物の映像の中から、マウスでクリックしてテンプレート画像を保存、 テンプレートマッチングを使用して人物を追跡した時の映像です。 検知した位置に四角の枠が表示されます。 人物が右側へ移動すると、追従して検知した位置も右側へ移動します。
映像をマウスでクリックした座標を中心座標として、ある大きさで周辺の矩形領域をテンプレートとして登録します。 映像を左上から右下にサーチしながら入力映像の中に登録したテンプレート画像と一致する画像を見つけ、その座標を 決定します。背景のある映像の中からテンプレート画像をサーチして位置座標を検出し、PID位置制御を行うことで テンプレート画像の追跡を行います。
(PID位置制御=指令位置に対し制御対象位置のフィードバックを行い指令位置と制御対象位置の偏差を求め 偏差が小さくなるように比例、積分、微分のゲイン補償を行う。)
下図は、固定カメラにて撮影した人物の映像の中から、マウスでクリックしてテンプレート画像を保存、 テンプレートマッチングを使用して人物を追跡した時の映像です。 検知した位置に四角の枠が表示されます。 人物が右側へ移動すると、追従して検知した位置も右側へ移動します。
|
|
|
|
|
|
|
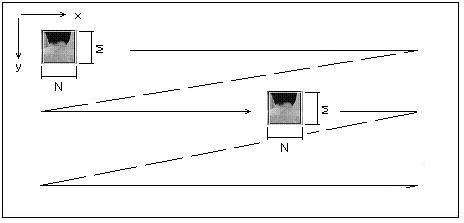
テンプレートマッチングでは下記の式で相関係数を求めます。 この相関係数を基にして、位置座標の検出を行っています。 G[x,y] :元の映像 T[x,y] :テンプレート画像

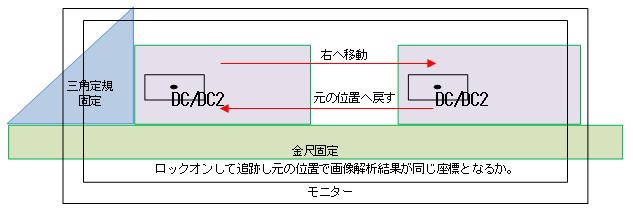
タッチパネルに映し出された映像の中からターゲットをロックオンして追跡します。
画像処理のテンプレートマッチング処理を使用した場合の座標検出精度を簡単に検証します。
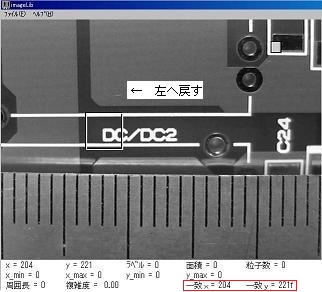
三角定規を固定し、基板の左端が三角定規に当たる位置で基板の”DC/DC2”の文字の左上の位置をクリックして モデルを登録します。
ロックオンした直後の座標が右下に表示され、今回は(x,y)=(204,221)となりました。
基板を右に移動させると、テンプレートマッチング処理にて”DC/DC2”の文字を追跡し検知したモデルの中心座標が 右下に表示されます。その座標は(x,y)=(523,224)となりました。
この状態から基板を三角定規に当たるまで移動し(x,y)=(204,221)との誤差が繰り返し精度となります。
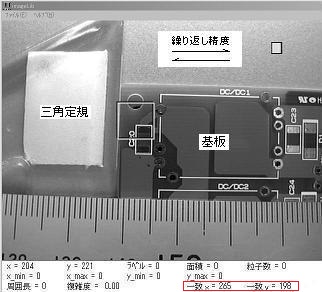
ソフトウエア画像処理のテンプレートマッチング処理の繰り返し精度を計測しました。
三角定規を固定し、基板の左端が三角定規に当たる位置で基板の”DC/DC2”の文字の左上の位置をクリックして モデルを登録します。
ロックオンした直後の座標が右下に表示され、今回は(x,y)=(204,221)となりました。
基板を右に移動させると、テンプレートマッチング処理にて”DC/DC2”の文字を追跡し検知したモデルの中心座標が 右下に表示されます。その座標は(x,y)=(523,224)となりました。
この状態から基板を三角定規に当たるまで移動し(x,y)=(204,221)との誤差が繰り返し精度となります。
ソフトウエア画像処理のテンプレートマッチング処理の繰り返し精度を計測しました。
| 動かし方概要 |
|
三角定規を固定し、基板の左端が三角定規に当たる位置に置く。基板を右に移動させる。再度、基板を左に移動させる。 |
|---|---|---|
検証1ロックオン |
|
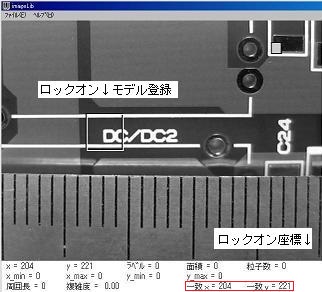
フォーカスが合う範囲で拡大し、基板の左端が三角定規に当たる位置に基板を移動し、基板のDC/DC2の文字の左上の位置をクリックしてモデルを登録します。
ロックオンした直後の座標が右下に表示され、今回は(x,y)=(204,221)となりました。
25mm÷640ドット≒25μm/ドット 座標(x,y)=(204,221) |
検証2追跡 |
|
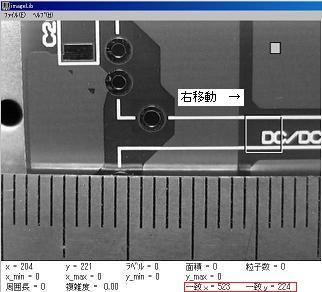
基板を右に移動させると、テンプレートマッチング処理にて”DC/DC2”の文字を追跡しロックしたモデルの中心座標が右下に表示されます。
その座標は(x,y)=(523,224)となりました。 座標(x,y)=(523,224) |
|---|---|---|
検証3繰り返し精度 |
|
再度、基板の左端が三角定規に当たる位置に基板を移動させます。
ロックオンした座標が右下に表示され、今回は(x,y)=(204,221)となりました。
基板を元の位置に戻すと、ロックオンした座標は、同じ値となりました。
ソフトによるテンプレートマッチング処理の繰り返し精度を計測しました。 座標(x,y)=(204,221) |
Top項目へのアクセス