- ホーム
- >実 験
- >PIDむだ時間補償>フィードバック制御
|
実験 >PIDむだ時間補償シミュレーション 関連項目 |
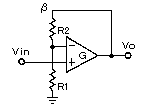
| オペアンプに帰還率βをもって負帰還(フィードバック)をかけた場合の出力精度について 検討します。 |
|
入力指令に対し、出力をある帰還率βをもってフィードバックをかけると、1/βの関係で動作し、その誤差率は1/Gβで、 オープンループゲインGを大きく設定することで、誤差を小さくすることができます。
オペアンプの実際のオープンループゲインは、0Hzで80dB程度あります。
帰還率は、β = R1/(R1+R2)で定義されます。
右図の入力と出力の関係式を求めると、±Vinの電位差をG倍したものがVoとなるので
(Vin-Vo*β)G = Vo
Vo/Vin = 1/(1/G+β)
Vo/Vin = 1/(1/G+β)
オペアンプのオープンループゲインGが、1より非常に大きい場合、
Vo/Vin = 1/β
となります。1/βとG/(1+Gβ)との比から、誤差ERR=1/Gβ
比 = 1+1/Gβ
|
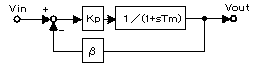
モータの伝達式を1/(1+sTm) として、モータにフィードバックをかけた場合の
出力精度について検討します。 Kp : 比例ゲイン Tm : 時定数) |
|
|
入力指令に対し、出力をある帰還率βをもってフィードバックをかけると、
1/βの関係で動作し、直流モータの伝達式 Kp/(1+sTm) と比較して
周波数特性が1/(1+Kpβ)に改善された事が分かります。
但し定常偏差が発生します。 直流モータの伝達式 Kp/(1+sTm) に、帰還率βをかけてループを組んだ 場合の伝達式を求めると、
Vo/Vin = Kp/(1+sTm+Kpβ)
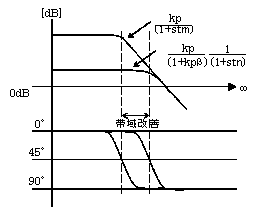
ここで分子、分母を(1+Kpβ)で割り、Tn = Tm/(1+Kpβ))とおくと
Vo/Vin = Kp/(1+Kpβ) * 1/(1+sTn)
ここで、モータの伝達式とフィードバックをかけた場合の伝達式を比較すると、 モータの時定数がTnとなり、Tmと比較して、
1/(1+Kpβ)に周波数特性が改善された事が分かります。
この時の直流ゲインは、s→0として、
Vo/Vin = 1/β (Kpが無限に大きい場合)
|
|
Top項目へのアクセス