- ホーム
- >実 験
- >PIDむだ時間補償>PIシミュレーション
上のメニューボタンにマウスを乗せると、サブメニューが表示されます。
|
実験 >関連項目 |
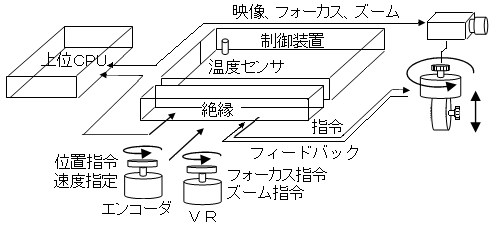
予め決められた定点の映像を取得するため、カメラを定点Aから定点Bに、また定点Bから定点Cに旋回する場合、 カメラの移動速度を一定に保つ制御、また定点A、B、Cに位置決めする制御を必要とします。これらの制御を 自動制御といい、昔から使用され確立した制御方式にPID制御方式があります。 速度制御では、設定された一定速度に素早く安定し、速度のバラツキが小さい制御を目標とします。 上記のシステムでカメラと雲台を使用して対象物の追跡を行う位置制御では、対象物を追跡しながら、 対象物の映像が常に画面の中央に映るよう位置決めすることを目標とします。 Pとは指令と実際の対象物の位置との偏差に比例した制御量を出力する比例ゲインの事です。 偏差が大きいと偏差に比例して大きな制御量を出力し、より目標にカメラの位置を近づけようとします。 I とは目標と実際の対象物の位置との偏差を積分した制御量を出力する場合の、積分に要する時間のことです。 目標と実際の対象物の位置の偏差が小さくなると、比例制御Pのみでは対象物を移動させるのに出力が足りなくなります。 小さな偏差を積分して出力を大きくし、より目標へ近づける働きをします。 Dとは対象物の位置の変化量に比例したゲインと微分時間のことです。先行微分の場合、 対象物の位置が大きく変動した場合その変動を抑える目的で使用します。 |
下記シミュレーションは、C言語でプログラムしました。ブロックダイヤの伝達式を個々に Z変換し、差分方程式に直します。
その差分方程式にステップ電圧を入力し、その応答を演算しました。むだ時間の存在する制御系でPIDむだ時間補償と
PI補償を比較するためのシミュレーションを行います。
|
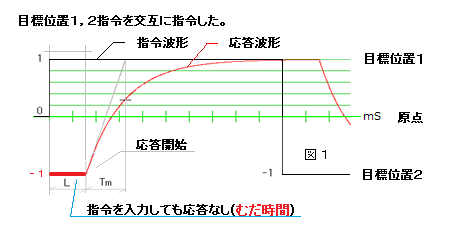
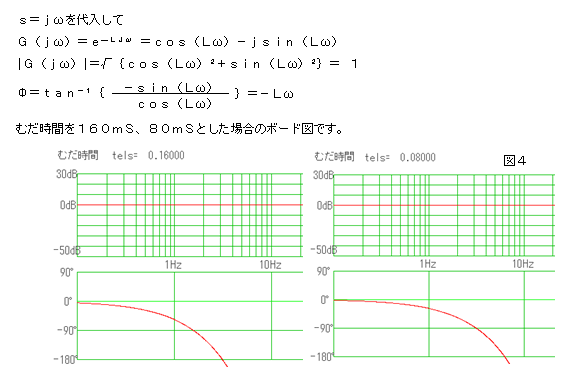
制御対象にステップの動作指令を加えても、全く制御対象が動作しない時間帯があります。 この時間帯(L)をむだ時間と言い、むだ時間経過後、時定数により動作します。 このむだ時間を含む制御のシミュレーションを行います。 |
|
|
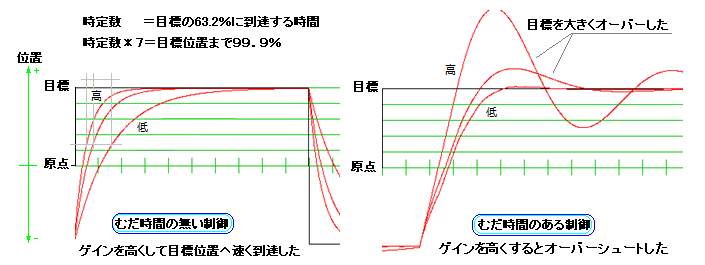
むだ時間の大きい制御対象にステップの動作指令を加えると、むだ時間補償が無い場合、その応答に大きなオーバーシュートが発生します。
|
制御対象を目標速度に設定するため、PI制御を行う場合を考えます。むだ時間(L)を含む制御対象の場合、
制御対象の時定数(Tm)に対し、むだ時間(L)が大きくなると、その制御対象の応答は目標速度付近で振動します。
制御対象の振動を抑え、安定を図る方法として、スミスのむだ時間補償があります。
制御対象の振動を抑え、安定を図る方法として、スミスのむだ時間補償があります。
むだ時間補償と一般的なPI制御と比較しながらシミュレーションを行います。
むだ時間補償を行う場合、制御対象の伝達関数を同定することになりますが、予測むだ時間を制御対象に 完全に一致させることは難しく、誤差がある場合の制御方法を検討します。 オーバーシュートが発生しないように制御します。
シミュレーションは、各伝達関数をZ変換し、差分方程式を作成、演算結果をそのままフィードバックしています。
シミュレーションのデフォルトの条件は、下記となります。
むだ時間補償を行う場合、制御対象の伝達関数を同定することになりますが、予測むだ時間を制御対象に 完全に一致させることは難しく、誤差がある場合の制御方法を検討します。 オーバーシュートが発生しないように制御します。
シミュレーションは、各伝達関数をZ変換し、差分方程式を作成、演算結果をそのままフィードバックしています。
シミュレーションのデフォルトの条件は、下記となります。
入力波形 :±1の矩形波 0.5Hz又は0.25Hz
サンプルレート :1mS
一目盛りの時間軸 :100mS
パラメータ時間単位 :mS
制御対象一次遅れ時定数(Tm)160mS、むだ時間160mSと、パラメータを変更して比較しています。
サンプルレート :1mS
一目盛りの時間軸 :100mS
パラメータ時間単位 :mS
|
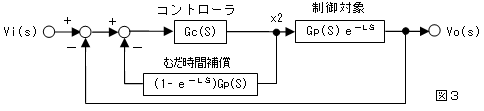
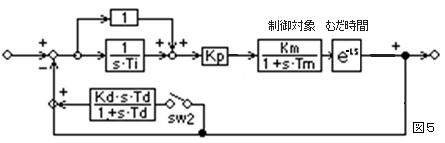
今回シミュレーションを行うブロックダイヤです。 制御対象を一次遅れの下記の伝達関数とし、 むだ時間を PI補償を行いSW2OFFとしてフィードバックします。 |
|
|
むだ時間補償無しで、制御対象のむだ時間を変化させながらPI制御を行った場合のシミュレーションです。
|
比例ゲイン(Kp)=1~3 積分時間(Ti)=160mS 制御対象(Tm)=160mS 制御対象ゲイン(Km)=1 むだ時間 |
図6:制御対象のむだ時間0mSで、比例ゲインのみを変化させた場合、 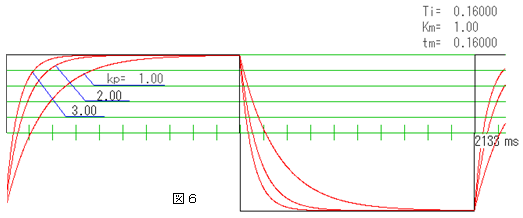
|
比例ゲイン(Kp)=1 積分時間(Ti)=160mS 制御対象(Tm)=160mS 制御対象ゲイン(Km)=1 むだ時間 |
図7:比例ゲイン=1で制御対象のむだ時間を0~160mS変化させた場合 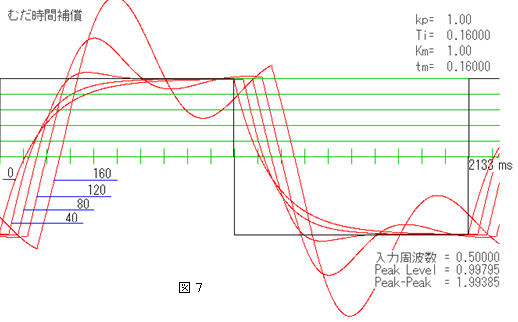
|
|
制御対象の時定数(Tm)に対し40mS(0.25)、80mS(0.5)、120mS(0.75)、160mS(1.0倍)のむだ時間を与えると、
むだ時間の間、制御対象の応答が無いにも関わらず、指令値と制御対象の応答との偏差をPI補償にて積分し、その結果応答が不安定となります。
図7は、むだ時間が大きくなると、オーバーシュートが大きくなっています。
|
|
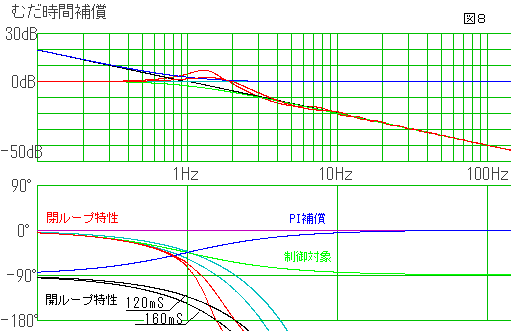
右グラフはむだ時間を120mS、160mS与えた場合の周波数特性です。
開ループゲインが1Hzにて0dBとなり、その時の
位相が-180度に近く、位相余裕が少なくなってい
ます。 開ループ特性:黒色 |
|
Top項目へのアクセス